
The Thread
The thesis proposal explored a design and fabrication system produced and constantly informed by a swarm of semi-autonomous airborne units, using relevant materials. In other words, the research focused on building tensile structures with programmed quadcopters. The proposed design system investigated a swarm of quadcopters braiding and bifurcating between different clusters of quadcopters to achieve an integral structure, where pulled in one area would alter the entire system. The swarm behavior was explored by algorithms, which enable a weaving character and emergence in the design. The flight control aimed to prove the opportunities of building and designing in real time with quadcopters. As such, an installation was created employing three AR parrot drones. The research was approach from three sections: material research, flight control, choreography that constantly informed one another to create a real scale prototype.
Collaboration: Maria Garcia-Mozota, Karthikeyan Arunachalam, Melhem Sfeir
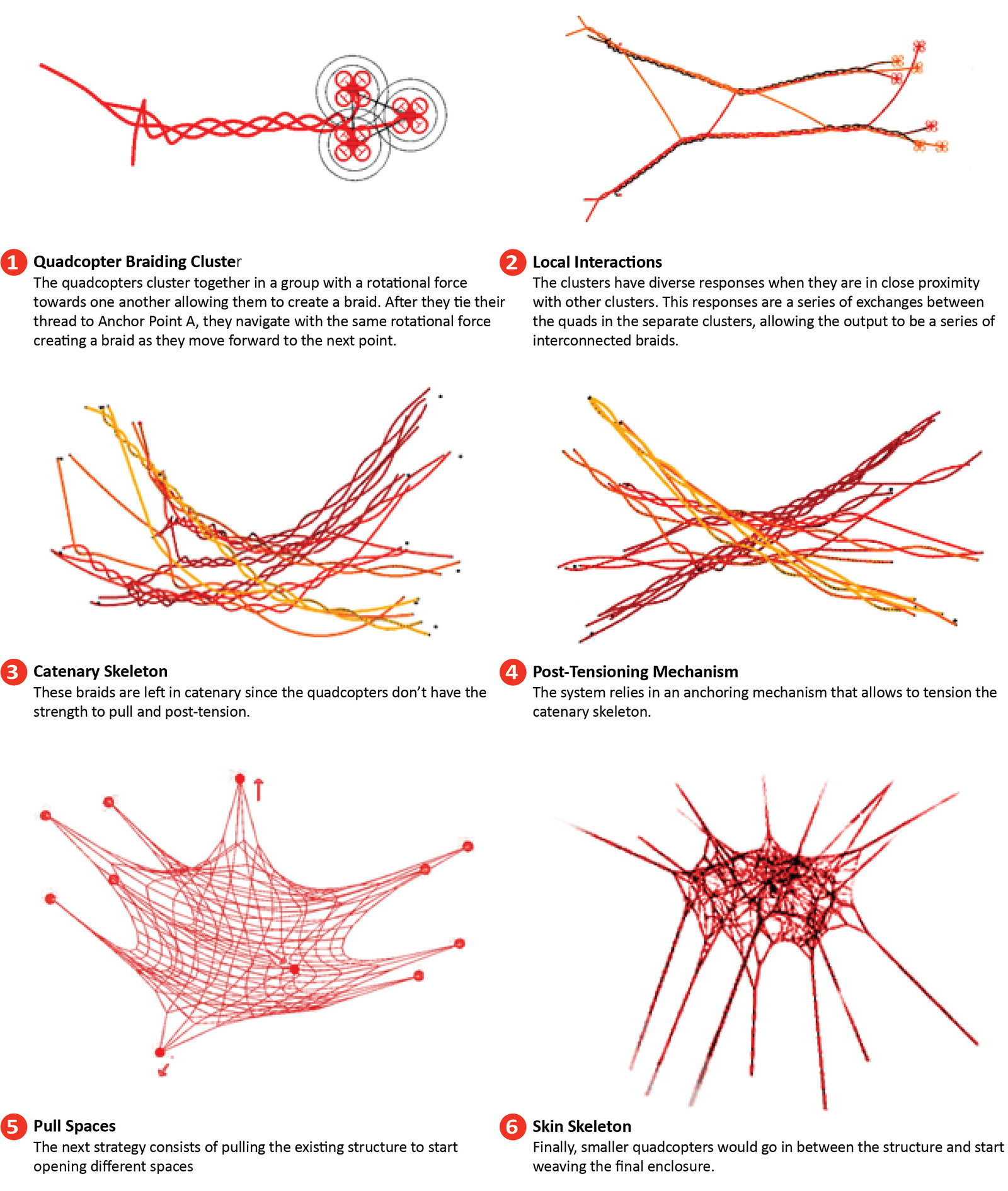
PROPOSED SYSTEM: Conceptual Scheme

TECHNOLOGY + MATERIAL: Extrusion System

PROPOSED SYSTEM: Digital Simulation
TECHNOLOGY (QUADCOPTER): Autonomous Flight

MATERIAL (THREAD): Physical + Digital Simulation

Conceptual Design Proposal

Flight Control
The aim was for the quadcopters to receive programmed instructions of where to go, braid with other quadcopters without collision, and have a stable flight. These goals were broken into tasks, such as: hovering, tracking, positioning, and semi-autonomous flying.
Digital Simulation
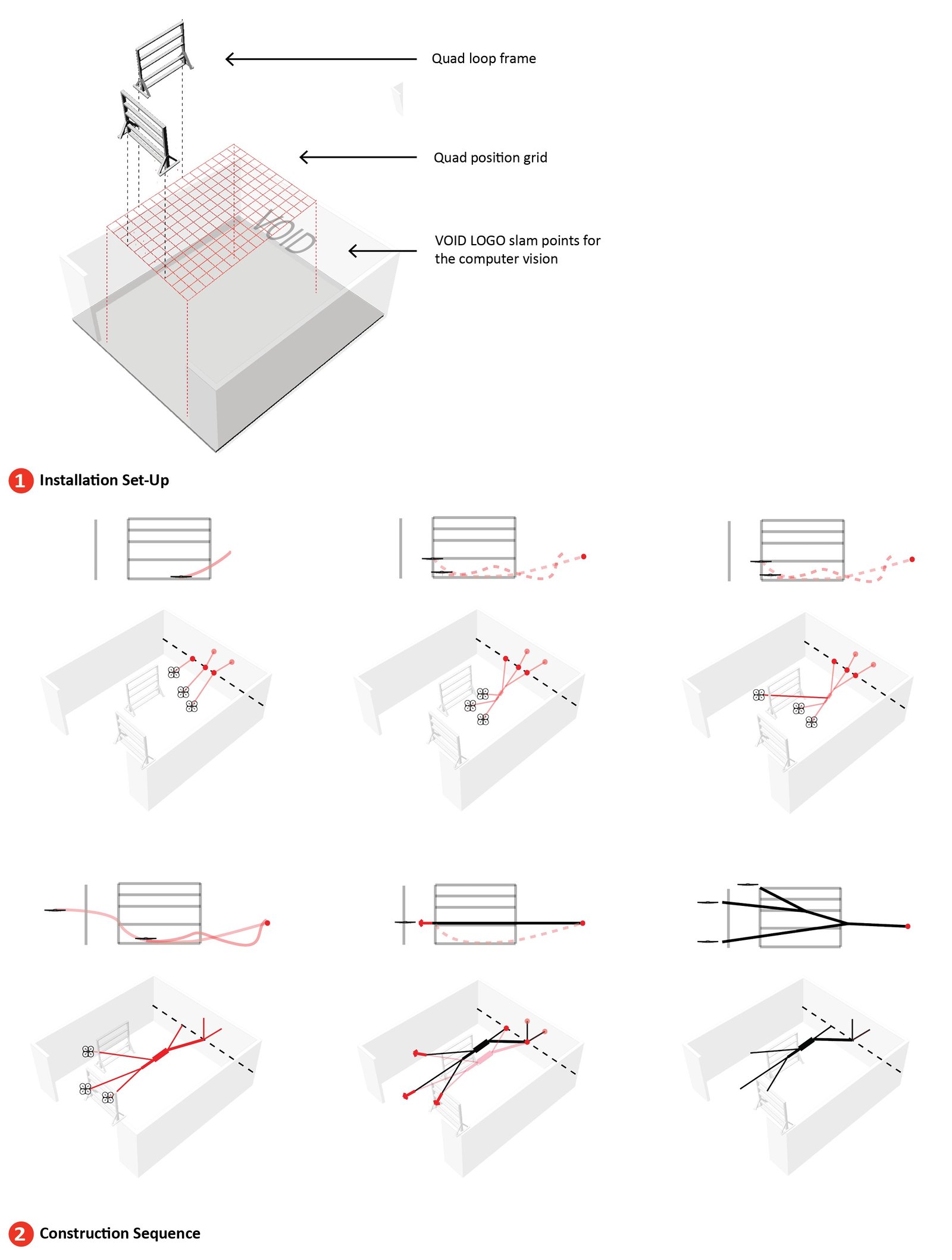
INSTALLATION: Construction
INSTALLATION: Final